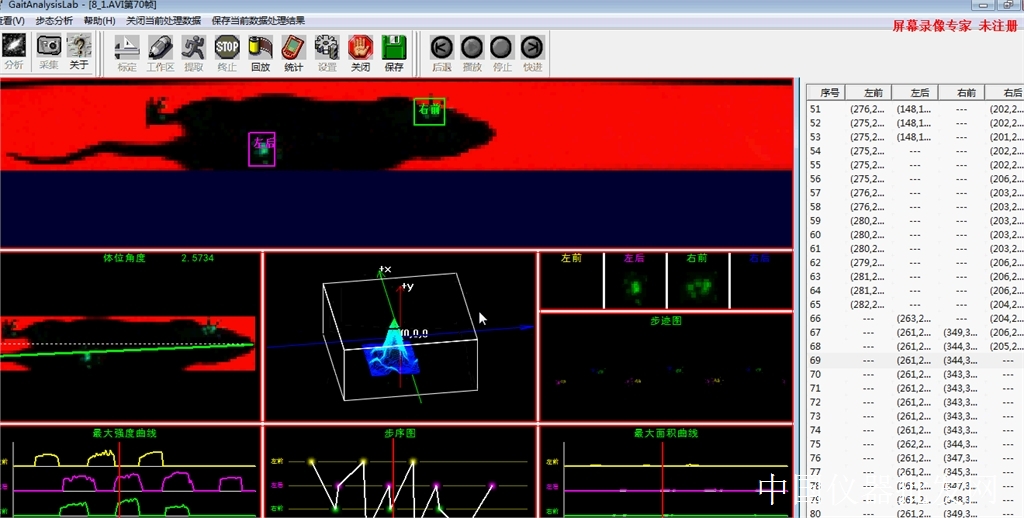

MGT-PR大小鼠步态行为分析系统(gait)是指大小鼠行走时所表现的姿态。大小鼠步态分析系统基于原有足迹分析方法(footprint analysis),运用技术对足印分析法进行了改进,通过足印图像增强技术采用高速摄像机可以清晰地采集大小鼠行走过程的足印信息,然后利用步态分析系统自动识别分析大小鼠足迹的步行周期、支撑距离、支撑时长、摆动时长、制动时长、推进时长、步频等60余种指标,以此客观、准确和全面地反映动物步态的变化情况。而且本步态分析系统集数据采集、监测、分析、统计处理、绘图制表、打印输出于一体,避免繁重的人工劳动,提高实验的自动化程度。本仪器可应用于脑缺血、阿尔茨海默病、帕金森氏病、脑外伤、脊髓损伤、疼痛疾病、关节炎等多种疾病动物模型步态的研究。

指标评价体系
步行周期 动物行走时一侧足跟着地到该侧足跟再次着地的过程被称为一个步行周期,一个步行周期可分为支撑相(stance phase)和摆动相(swing phase)
支撑时长 在一个步行周期中始终与地接触的阶段
摆动时长 在一个步行周期中始终与地无接触的阶段
支撑时相 支撑时长所占步态周期的百分数(cycle%)作为单位来表达。
单支撑时相 通常指一足着地到该足离地的过程。
双支撑时相 在一个步行周期中产生的双足同时着地的阶段。
三支撑时相 在一个步行周期中产生的三足同时着地的阶段
摆动时相 摆动时长所占步态周期的百分数(cycle%)作为单位来表达
制动时长 从该足开始接触时刻到该足与地面最大接触面积时刻所需的时长
制动指数 制动时长/支撑时长
推进时长 从该足与地面最大接触面积时刻到该足离地时刻所需的时长
推进指数 推进时长/支撑时长
同源协调性 被观测足爪(RH or LH)的摆动时间或支撑时间与对照足爪(LH or LF)的步行周期的比值
同侧协调性 被观测足爪(RH or LH)的摆动时间或支撑时间与对照足爪(RF or LF)的步行周期的比值
对侧协调性 被观测足爪(RH or LH)的摆动时间或支撑时间与对照足爪(LF or RF)的步行周期的比值
步幅 动物在一个步行周期中,同一前肢或后肢连续两个最大脚印横坐标中点之间的距离
左侧步基 动物在一个步行周期中,左前肢连续两个最大脚印横坐标中点与左后肢连续两个最大脚印横坐标中点之间的距离
右侧步基 同上
前肢步宽 在行走中左、右两足间的距离称为步宽,通常以足爪中点为测量参考点
后肢步宽 同上
足迹最大面积:t为足爪接触地面的最大面积时刻,最大面积计算公式为:
足迹平均面积:每帧图像足迹面积之和/总帧数
足迹最大强度:t为足爪接触地面的最大强度时刻,同理最大面积的计算方法:
足迹平均强度:每帧图像足迹强度之和/总帧数
摆动速度:步长/摆动时间
瞬时速度:每只爪子的步长/步行周期
平均速度:在一次行走过程中瞬时速度的平均值
总速度:在一次行走过程中,步长的总和/步长周期的总和
足角:在行走中前进的方向(体中线)与足的长轴所形成的夹角称为足角
平均体转角 老鼠嘴尖与尾根形成的轴线的方向和正前方向轴之间的夹角的平均值。比如老鼠移动的方向偏离正前方向5°
体转角标准偏差 老鼠嘴尖与尾根形成的轴线方向和正前方向轴之间的夹角的标准偏差。比如如果老鼠的平均体转角为5°,标准偏差为3°,那么代表动物有在2-8°的范围内运动的趋势
平均侧向移动 动物质量中心延Y轴侧向移动的距离
侧向移动标准偏差 动物质量中心延Y轴侧向移动的标准偏差
联系方式
联系人:马春梅女士 (文员)
电 话:
86-0561-5200608
打电话给我时,请一定说明在仪器批发网看到的,谢谢!
手 机: 需要登录后查看 马上登陆»
在线交谈:
 集成化信息化信号采集处理系统、一体化生物医学信号采集系统、信息化集成化信号采集与处理系统
集成化信息化信号采集处理系统、一体化生物医学信号采集系统、信息化集成化信号采集与处理系统
市场价:128000.00元/台
 超微显微钙成像系统
超微显微钙成像系统
 生物光子脑缺血功能解析系统
生物光子脑缺血功能解析系统
 生物光子肿瘤功能解析系统
生物光子肿瘤功能解析系统
 高分辨激光血流成像系统
高分辨激光血流成像系统
 在体&离体电生理记录系统
在体&离体电生理记录系统
 活体皮肤光透明试剂盒
活体皮肤光透明试剂盒
 活体颅骨光透明试剂盒
活体颅骨光透明试剂盒

淮北软隆生物科技有限公司
经营模式:
所在地区:安徽 淮北市
在线咨询:
成立时间: 2017年
 上手机找货源
上手机找货源